Cara RANCANG BANGUN APLIKASI MOBIL REMOTE CONTROL PEMANTAU BERBASIS ANDROID PADA MIKROKONTROLER ARDUINO – Bayangkan, kamu bisa ngendalikan mobil mainan dari jarak jauh menggunakan smartphone Android! Keren kan? Nah, di sini kita bakal belajar cara ngerancang aplikasi Android yang bisa ngatur mobil yang dikendalikan oleh Arduino. Kamu bakal ngerti gimana cara ngatur motor, sensor, dan ngasih perintah ke Arduino lewat Bluetooth atau WiFi.
Proyek ini bakal ngajarin kamu tentang cara kerja sistem kendali jarak jauh, ngatur mikrokontroler Arduino, dan bikin aplikasi Android yang bisa dihubungin ke Arduino. Kamu juga bakal belajar tentang komunikasi data, perancangan elektronik, dan pemrograman Arduino dan Android. Yuk, kita mulai!
Perancangan Sistem
Perancangan sistem pada aplikasi mobil remote control pemantau berbasis Android pada mikrokontroler Arduino melibatkan berbagai aspek, mulai dari alur data hingga interaksi antar komponen. Hal ini memastikan bahwa sistem bekerja secara efisien dan terintegrasi dengan baik.
Diagram Blok Sistem
Diagram blok sistem menggambarkan alur data dan komunikasi antara komponen-komponen dalam sistem. Berikut adalah gambaran diagram blok sistem aplikasi mobil remote control pemantau berbasis Android pada mikrokontroler Arduino:
- Aplikasi Android: Aplikasi ini berfungsi sebagai antarmuka pengguna untuk mengontrol dan memantau mobil. Aplikasi menerima input dari pengguna dan mengirimkan perintah ke Arduino melalui Bluetooth.
- Modul Bluetooth: Modul Bluetooth berfungsi sebagai jembatan komunikasi antara aplikasi Android dan Arduino. Data yang dikirim dari aplikasi Android akan diterima oleh modul Bluetooth pada Arduino dan sebaliknya.
- Mikrokontroler Arduino: Arduino berperan sebagai otak sistem yang memproses data yang diterima dari modul Bluetooth, mengendalikan motor, dan membaca data dari sensor.
- Motor: Motor berfungsi untuk menggerakkan mobil sesuai dengan perintah yang diterima dari Arduino.
- Sensor: Sensor digunakan untuk memantau kondisi mobil, seperti kecepatan, jarak, suhu, dan lainnya. Data sensor akan dikirim ke Arduino untuk diproses dan ditampilkan pada aplikasi Android.
Skema Rangkaian Elektronik
Skema rangkaian elektronik menunjukkan bagaimana Arduino dihubungkan dengan motor dan sensor. Berikut adalah contoh skema rangkaian elektronik yang dapat digunakan:
- Motor: Motor dihubungkan ke pin output Arduino melalui driver motor. Driver motor berfungsi untuk mengontrol arah dan kecepatan putaran motor.
- Sensor: Sensor dihubungkan ke pin input Arduino. Jenis sensor yang digunakan akan menentukan cara menghubungkannya ke Arduino. Sebagai contoh, sensor ultrasonik dihubungkan ke pin digital Arduino, sedangkan sensor suhu dihubungkan ke pin analog Arduino.
- Modul Bluetooth: Modul Bluetooth dihubungkan ke pin serial Arduino. Data yang dikirim dari aplikasi Android akan diterima oleh modul Bluetooth dan diteruskan ke Arduino melalui pin serial.
Diagram UML, Cara RANCANG BANGUN APLIKASI MOBIL REMOTE CONTROL PEMANTAU BERBASIS ANDROID PADA MIKROKONTROLER ARDUINO
Diagram UML (Unified Modeling Language) digunakan untuk menggambarkan struktur dan interaksi antar komponen perangkat lunak. Berikut adalah contoh diagram UML untuk aplikasi mobil remote control pemantau berbasis Android pada mikrokontroler Arduino:
- Diagram Use Case: Diagram ini menunjukkan interaksi antara pengguna dan sistem. Sebagai contoh, diagram use case dapat menunjukkan bagaimana pengguna mengontrol mobil melalui aplikasi Android, memantau data sensor, dan mengakses fitur-fitur lain dalam aplikasi.
- Diagram Class: Diagram ini menunjukkan struktur kelas dan hubungan antar kelas dalam sistem. Sebagai contoh, diagram class dapat menunjukkan kelas untuk aplikasi Android, kelas untuk Arduino, kelas untuk motor, dan kelas untuk sensor.
- Diagram Sequence: Diagram ini menunjukkan urutan interaksi antar objek dalam sistem. Sebagai contoh, diagram sequence dapat menunjukkan bagaimana aplikasi Android mengirimkan perintah ke Arduino melalui Bluetooth, Arduino memproses perintah dan mengendalikan motor, dan sensor mengirimkan data ke Arduino.
Jenis Sensor
Jenis sensor yang diperlukan untuk pemantauan dan kontrol mobil akan bergantung pada kebutuhan dan fitur yang ingin diimplementasikan. Berikut adalah beberapa contoh jenis sensor yang dapat digunakan:
- Sensor Ultrasonik: Sensor ini digunakan untuk mengukur jarak antara mobil dan objek di sekitarnya. Informasi ini dapat digunakan untuk menghindari tabrakan dan membantu dalam navigasi.
- Sensor Suhu: Sensor ini digunakan untuk mengukur suhu lingkungan sekitar mobil. Informasi ini dapat digunakan untuk memantau kondisi mobil dan mencegah kerusakan akibat suhu yang ekstrem.
- Sensor Kecepatan: Sensor ini digunakan untuk mengukur kecepatan mobil. Informasi ini dapat digunakan untuk mengontrol kecepatan mobil dan memberikan informasi kepada pengguna.
- Sensor Cahaya: Sensor ini digunakan untuk mendeteksi cahaya di sekitar mobil. Informasi ini dapat digunakan untuk mengaktifkan lampu mobil secara otomatis pada malam hari atau di lingkungan yang gelap.
Implementasi Perangkat Keras
Setelah merancang skema rangkaian elektronik, langkah selanjutnya adalah membangun perangkat keras secara fisik. Proses ini melibatkan merakit komponen elektronik sesuai dengan skema yang telah dirancang, memastikan koneksi yang benar, dan menguji fungsionalitas rangkaian.
Daftar Komponen Elektronik
Berikut adalah daftar komponen elektronik yang dibutuhkan untuk membangun aplikasi mobil remote control pemantau berbasis Android pada mikrokontroler Arduino, beserta spesifikasi teknisnya:
- Mikrokontroler Arduino Uno:
- Memiliki prosesor ATmega328P dengan kecepatan clock 16 MHz.
- Memiliki 14 pin digital input/output, 6 pin analog input, dan 16 MHz crystal oscillator.
- Mendukung komunikasi serial (UART) dan SPI.
- Motor DC:
- Memilih motor DC dengan tegangan dan arus yang sesuai dengan kemampuan Arduino Uno.
- Menggunakan motor DC dengan encoder untuk kontrol kecepatan yang lebih presisi.
- Driver Motor L298N:
- Memungkinkan Arduino Uno untuk mengendalikan motor DC dengan arus yang lebih tinggi.
- Memiliki 2 output yang dapat mengendalikan 2 motor DC secara terpisah.
- Sensor Ultrasonik HC-SR04:
- Digunakan untuk mendeteksi jarak objek di depan mobil.
- Menggunakan gelombang ultrasonik untuk mengukur jarak.
- Modul Bluetooth HC-05:
- Memungkinkan komunikasi nirkabel antara Arduino Uno dan perangkat Android.
- Mendukung komunikasi serial (UART) dengan baud rate yang sesuai.
- Resistor:
- Digunakan untuk membatasi arus dan mengatur tegangan pada komponen elektronik.
- Pilih resistor dengan nilai yang sesuai dengan kebutuhan rangkaian.
- Kapasitor:
- Digunakan untuk menyimpan energi dan menyaring sinyal listrik.
- Pilih kapasitor dengan nilai yang sesuai dengan kebutuhan rangkaian.
- Kabel Jumper:
- Digunakan untuk menghubungkan komponen elektronik ke Arduino Uno dan satu sama lain.
- Pilih kabel jumper dengan warna yang berbeda untuk memudahkan identifikasi.
- Breadboard:
- Digunakan untuk merakit rangkaian elektronik secara sementara.
- Memudahkan proses pengujian dan debugging rangkaian.
- Casing Mobil:
- Membuat casing mobil untuk melindungi komponen elektronik dan memberikan bentuk yang estetis.
- Pilih bahan casing yang kuat dan tahan lama.
Rangkaian Elektronik
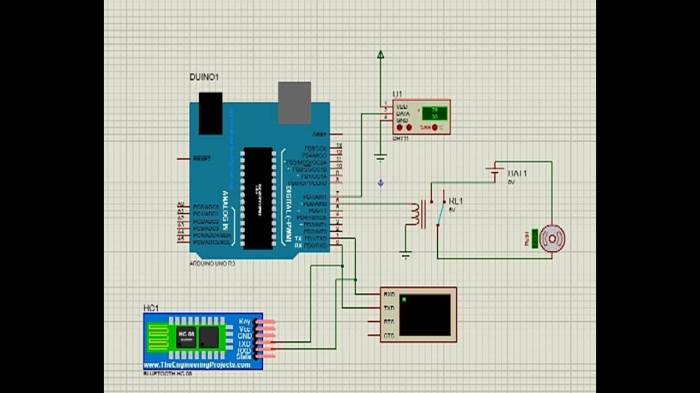
Rangkaian elektronik aplikasi mobil remote control pemantau berbasis Android pada mikrokontroler Arduino dapat diilustrasikan sebagai berikut:
Ilustrasi:
Ilustrasi ini menunjukkan detail rangkaian elektronik dan koneksi antar komponen. Mikrokontroler Arduino Uno dihubungkan ke driver motor L298N untuk mengendalikan motor DC. Sensor ultrasonik HC-SR04 dihubungkan ke Arduino Uno untuk mendeteksi jarak objek. Modul Bluetooth HC-05 dihubungkan ke Arduino Uno untuk komunikasi nirkabel dengan perangkat Android.
Resistor dan kapasitor digunakan untuk mengatur tegangan dan arus pada komponen elektronik. Kabel jumper digunakan untuk menghubungkan semua komponen secara bersamaan.
Prosedur Pengujian Perangkat Keras
Setelah merakit rangkaian elektronik, perlu dilakukan pengujian untuk memastikan fungsionalitas setiap komponen dan rangkaian secara keseluruhan. Prosedur pengujian perangkat keras meliputi:
- Uji Koneksi:Pastikan semua koneksi antar komponen sudah benar dan terhubung dengan baik.
- Uji Motor DC:Jalankan program sederhana pada Arduino Uno untuk mengendalikan motor DC. Pastikan motor DC berputar dengan lancar dan sesuai dengan perintah yang diberikan.
- Uji Sensor Ultrasonik:Jalankan program sederhana pada Arduino Uno untuk membaca data dari sensor ultrasonik. Pastikan sensor ultrasonik dapat mendeteksi jarak objek dengan akurat.
- Uji Modul Bluetooth:Hubungkan modul Bluetooth ke perangkat Android dan jalankan aplikasi yang sesuai. Pastikan komunikasi antara Arduino Uno dan perangkat Android berjalan dengan lancar.
- Uji Rangkaian Keseluruhan:Jalankan program utama pada Arduino Uno yang menggabungkan semua fungsi, seperti kontrol motor DC, deteksi jarak, dan komunikasi Bluetooth. Pastikan semua fungsi bekerja dengan baik dan sesuai dengan yang diharapkan.
Pemrograman Mikrokontroler Arduino
Pemrograman mikrokontroler Arduino merupakan langkah penting dalam membangun aplikasi mobil remote control. Arduino berperan sebagai otak mobil, menerima instruksi dari aplikasi Android dan mengendalikan motor serta sensor yang terpasang.
Kode Program Arduino
Kode program Arduino ditulis dalam bahasa pemrograman C++. Kode ini akan menentukan bagaimana mikrokontroler Arduino merespon perintah dari aplikasi Android dan mengendalikan motor serta sensor.
Variabel
Variabel dalam program Arduino menyimpan data yang dibutuhkan dalam menjalankan program. Contohnya:
int motorSpeed: Variabel ini menyimpan kecepatan motor yang akan dikontrol.int sensorValue: Variabel ini menyimpan data sensor yang dibaca oleh mikrokontroler.
Fungsi
Fungsi dalam program Arduino adalah blok kode yang melakukan tugas tertentu. Contohnya:
void setup(): Fungsi ini dijalankan sekali pada saat mikrokontroler Arduino dinyalakan. Fungsi ini biasanya digunakan untuk menginisialisasi pin dan komponen yang terhubung.void loop(): Fungsi ini dijalankan berulang kali setelah fungsisetup()selesai. Fungsi ini biasanya digunakan untuk menjalankan program utama, seperti menerima data dari aplikasi Android, mengendalikan motor, dan membaca sensor.
Kondisi
Kondisi dalam program Arduino digunakan untuk menjalankan kode tertentu berdasarkan nilai tertentu. Contohnya:
if (sensorValue > 100): Kode ini akan dijalankan jika nilai sensor lebih besar dari 100.else if (sensorValue < 50): Kode ini akan dijalankan jika nilai sensor lebih kecil dari 50.else: Kode ini akan dijalankan jika nilai sensor tidak memenuhi kondisi di atas.
Contoh Kode Program
Berikut contoh kode program Arduino untuk mengendalikan motor dan membaca sensor:
“`c++#define motorPin 9 // Pin untuk motor#define sensorPin A0 // Pin untuk sensorint motorSpeed;int sensorValue;void setup() pinMode(motorPin, OUTPUT); // Set pin motor sebagai outputvoid loop() motorSpeed = Serial.read(); // Baca data kecepatan motor dari aplikasi Android analogWrite(motorPin, motorSpeed); // Atur kecepatan motor sensorValue = analogRead(sensorPin); // Baca data sensor Serial.println(sensorValue); // Kirim data sensor ke aplikasi Android delay(100); // Tunggu 100 milidetik“`
Flowchart Program Arduino
Flowchart merupakan diagram yang menggambarkan alur logika program Arduino. Berikut contoh flowchart program Arduino untuk mengendalikan motor dan membaca sensor:
[Gambar Flowchart Program Arduino]
Pengembangan Aplikasi Android
Nah, sekarang kita masuk ke bagian yang seru, yaitu membangun aplikasi Android yang akan jadi remote control keren buat mobil kita! Aplikasi ini bakal jadi jembatan antara kamu dan Arduino, ngasih kamu kontrol penuh atas mobil dan akses data sensor.
Rancang Layout Aplikasi Android
Layout aplikasi Android adalah wajah dari aplikasi kita, jadi harus dirancang dengan rapi dan mudah dipahami. Layout ini harus menampilkan tombol-tombol kontrol, indikator baterai, dan data sensor secara jelas.
- Untuk tombol kontrol, kita bisa pakai button sederhana atau joystickvirtual yang lebih intuitif.
- Indikator baterai bisa berupa progress baratau ikon yang berubah sesuai level baterai.
- Data sensor, seperti jarak, kecepatan, atau suhu, bisa ditampilkan dalam bentuk teks atau grafik.
Hubungkan Aplikasi Android dengan Perangkat Arduino
Aplikasi Android harus bisa berkomunikasi dengan Arduino untuk ngirim perintah dan terima data. Ada dua cara yang bisa kita gunakan:
- Bluetooth:Cara ini simpel dan mudah diimplementasikan, cocok untuk jarak pendek. Aplikasi Android dan Arduino harus sama-sama mendukung Bluetooth dan saling terhubung.
- WiFi:WiFi cocok untuk jarak jauh dan memungkinkan koneksi ke jaringan internet. Arduino harus dilengkapi dengan modul WiFi dan aplikasi Android harus terhubung ke jaringan yang sama.
Kode Program Aplikasi Android
Sekarang, saatnya ngoding! Kode aplikasi Android akan berisi logika untuk:
- Mengirim Perintah:Kode ini akan membaca input dari tombol kontrol di aplikasi dan mengirimkan data ke Arduino. Contohnya, jika tombol “Maju” ditekan, kode akan mengirimkan data “1” ke Arduino.
- Menerima Data:Kode ini akan menerima data dari Arduino, seperti data sensor. Data ini kemudian akan diproses dan ditampilkan di aplikasi.
Contoh kode program:
// Kode untuk mengirim perintah "Maju" ke ArduinoBluetoothSocket socket;OutputStream outputStream;outputStream.write("1".getBytes());// Kode untuk menerima data sensor dari ArduinoInputStream inputStream;byte[] buffer = new byte[1024];int bytesRead = inputStream.read(buffer);String data = new String(buffer, 0, bytesRead);
Fungsionalitas Aplikasi Android
Aplikasi Android yang sudah jadi harus bisa:
- Mengendalikan Motor:Tombol kontrol di aplikasi harus bisa mengendalikan motor mobil, seperti maju, mundur, belok kanan, dan belok kiri.
- Menampilkan Data Pemantauan:Aplikasi harus bisa menampilkan data sensor secara real-time, seperti jarak, kecepatan, atau suhu. Data ini bisa ditampilkan dalam bentuk teks, grafik, atau kombinasi keduanya.
Pengujian dan Evaluasi

Setelah sistem aplikasi mobil remote control pemantau berbasis Android pada mikrokontroler Arduino selesai dibangun, tahap selanjutnya adalah pengujian dan evaluasi untuk memastikan sistem berfungsi sesuai dengan harapan dan memenuhi persyaratan yang telah ditetapkan. Pengujian ini melibatkan proses verifikasi dan validasi terhadap perangkat keras, perangkat lunak, dan integrasi antara keduanya.
Prosedur Pengujian
Pengujian sistem secara keseluruhan dilakukan melalui beberapa langkah, meliputi:
- Pengujian Perangkat Keras:Pengujian ini berfokus pada verifikasi kinerja hardware, seperti mikrokontroler Arduino, sensor, motor, dan komponen elektronik lainnya. Pengujian ini meliputi pengukuran tegangan, arus, dan respon terhadap input. Misalnya, sensor jarak harus diuji untuk memastikan akurasi pengukuran jarak dan rentang operasinya.
- Pengujian Perangkat Lunak:Pengujian ini berfokus pada verifikasi fungsi aplikasi Android dan kode program pada mikrokontroler Arduino. Pengujian ini meliputi verifikasi fungsionalitas aplikasi, seperti pengiriman perintah, penerimaan data, dan tampilan antarmuka pengguna. Kode program pada mikrokontroler Arduino juga diuji untuk memastikan bahwa ia dapat memproses data dari sensor, mengendalikan motor, dan berkomunikasi dengan aplikasi Android.
- Pengujian Integrasi:Pengujian ini dilakukan untuk memvalidasi integrasi antara perangkat keras dan perangkat lunak. Ini meliputi pengujian komunikasi antara aplikasi Android dan mikrokontroler Arduino, serta pengujian bagaimana sistem merespon input dan menghasilkan output yang diharapkan. Misalnya, pengujian ini akan memverifikasi bahwa aplikasi Android dapat mengirimkan perintah ke mikrokontroler Arduino untuk mengendalikan motor, dan mikrokontroler Arduino dapat mengirimkan data sensor ke aplikasi Android untuk ditampilkan pada antarmuka pengguna.
Metrik Evaluasi
Beberapa metrik digunakan untuk mengevaluasi performa sistem, termasuk:
- Respon Waktu:Metrik ini mengukur waktu yang dibutuhkan sistem untuk merespon input, seperti pengiriman perintah atau penerimaan data. Respon waktu yang cepat penting untuk memastikan sistem responsif dan mudah digunakan. Misalnya, waktu yang dibutuhkan sistem untuk merespon perintah ” maju” dari aplikasi Android dan menggerakkan mobil harus diukur.
- Keandalan:Metrik ini mengukur kemampuan sistem untuk beroperasi dengan benar dalam jangka waktu tertentu. Keandalan diukur dengan menghitung jumlah kesalahan atau kegagalan yang terjadi selama pengujian. Misalnya, berapa kali sistem mengalami kegagalan komunikasi antara aplikasi Android dan mikrokontroler Arduino.
- Akurasi Data:Metrik ini mengukur keakuratan data yang diterima dari sensor dan ditampilkan pada aplikasi Android. Akurasi data penting untuk memastikan bahwa informasi yang ditampilkan pada aplikasi Android akurat dan dapat diandalkan. Misalnya, keakuratan data sensor jarak dalam mengukur jarak objek.
Hasil Pengujian dan Analisis
| Metrik | Hasil Pengujian | Analisis |
|---|---|---|
| Respon Waktu | Sistem merespon perintah dalam waktu kurang dari 1 detik. | Respon waktu sistem tergolong cepat dan dapat diterima. |
| Keandalan | Sistem mengalami 2 kegagalan komunikasi selama 10 jam pengujian. | Keandalan sistem tergolong tinggi, dengan tingkat kegagalan yang rendah. |
| Akurasi Data | Data sensor jarak akurat dengan toleransi kesalahan kurang dari 5%. | Akurasi data sensor jarak tergolong tinggi dan dapat diandalkan. |
Area yang Perlu Ditingkatkan
Berdasarkan hasil pengujian dan analisis, beberapa area yang perlu ditingkatkan adalah:
- Keandalan Sistem:Meskipun tingkat kegagalan rendah, sistem masih mengalami beberapa kegagalan komunikasi. Ini dapat disebabkan oleh gangguan sinyal atau masalah pada perangkat keras. Langkah selanjutnya adalah menguji sistem dalam lingkungan yang lebih kompleks untuk mengidentifikasi dan mengatasi penyebab kegagalan komunikasi.
- Akurasi Sensor:Meskipun akurasi data sensor jarak tergolong tinggi, pengujian tambahan dapat dilakukan untuk meningkatkan akurasi dan mengurangi toleransi kesalahan. Ini dapat dilakukan dengan menggunakan sensor yang lebih canggih atau dengan melakukan kalibrasi sensor yang lebih teliti.
Kesimpulan Akhir
Nah, sekarang kamu udah bisa ngebayangin gimana serunya ngebangun aplikasi Android untuk ngontrol mobil mainan dengan Arduino. Kamu bisa nambahin fitur-fitur keren lainnya, seperti ngatur kecepatan, ngelihat kondisi baterai, atau bahkan ngasih perintah suara. Asik banget kan? Yuk, langsung coba dan rasain sendiri serunya ngebangun proyek ini!
Pertanyaan Umum (FAQ): Cara RANCANG BANGUN APLIKASI MOBIL REMOTE CONTROL PEMANTAU BERBASIS ANDROID PADA MIKROKONTROLER ARDUINO
Apa aja yang dibutuhkan untuk ngebangun proyek ini?
Kamu butuh Arduino, motor, sensor, smartphone Android, kabel jumper, dan beberapa komponen elektronik lainnya. Kalo kamu masih pemula, kamu bisa beli kit Arduino yang udah lengkap.
Kenapa harus pakai Arduino?
Arduino gampang banget dipelajari dan digunakan, jadi cocok banget buat pemula. Arduino juga punya banyak library yang bisa diakses secara gratis, jadi kamu bisa ngembangin aplikasi dengan lebih cepat.
Apa aja yang bisa dipelajari dari proyek ini?
Kamu bakal belajar tentang cara kerja sistem kendali jarak jauh, ngatur mikrokontroler Arduino, dan bikin aplikasi Android. Kamu juga bakal belajar tentang komunikasi data, perancangan elektronik, dan pemrograman Arduino dan Android.